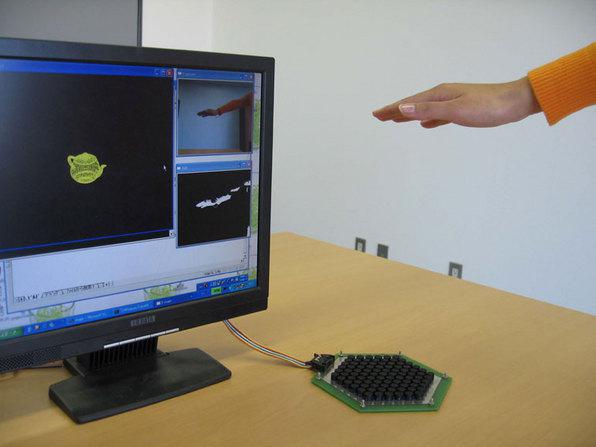
Emitor de ultrasonidos. Fuente: Siggraph 2008.
La realidad virtual nos invade cada vez más, y los últimos avances en gráficas computerizadas, simulaciones físicas, y tecnologías de visualización demandan un avance también de las técnicas de interacción háptica (es decir, las técnicas que nos permiten sentir con el tacto).
Y es que, con la expansión multimedia, nuestros ojos y oídos están siendo inundados con todo tipo de información sensorial. Pero el tacto sigue abandonado, dada la dificultad tecnológica que entraña lograr sensaciones a este nivel. Sin embargo, es evidente que el público demanda cada vez más interacción y realismo en sus experiencias virtuales.
Hasta ahora, asir un objeto inexistente con nuestras manos y sentirlo, aunque en realidad sólo exista en una pantalla de ordenador, ha sido posible únicamente si nos enfundamos un guante equipado con sensores capaces de decodificar los movimientos de la mano, e imprimirle calculadas sensaciones, a tiempo real.
Sin embargo, la ilusión sensorial se ve minada en estos casos por el peso de esta especie de exoesqueleto que es el guante (que puede pesar alrededor de un kilo), por lo que dista mucho de ser “perfecta”.
Solución ultrasónica
Ahora, un equipo de investigadores de la Universidad de Tokio, en Japón, ha conseguido desarrollar una alternativa, que fue presentada en la conferencia sobre infografía o computación gráfica Siggraph 2008, celebrada el pasado agosto en Los Ángeles.
Se trata de un dispositivo bautizado como Airborne Ultrasound Tactile Display - 5k-, que irradia ondas de ultrasonido por el aire, producidas por múltiples transductores de ultrasonido basados en técnicas de síntesis de ondas. Con dichas ondas, se forman campos de presión de alta-fidelidad que pueden “enfocarse” directamente sobre la piel sin riesgo de atravesarla.
El efecto: con este sistema es posible experimentar sensaciones táctiles de un espacio virtual, sin necesidad de usar guantes u otros anexos mecánicos, señala Siggraph 2008 en un comunicado. La finalidad de este invento es aumentar el efecto táctil de los gráficos en tres dimensiones en el espacio, para lograr una sensación más creíble de estar tocando las figuras tridimensionales que aparecen en el ordenador.
Es dispositivo táctil utiliza uno de los fenómenos no lineales del ultrasonido: la presión de la radiación acústica. Diversos patrones espaciales de la presión de esta radiación pueden ser sintetizados usando la interferencia del ultrasonido.
Y es que el sonido es, en efecto, una onda de presión capaz de mover no sólo nuestro tímpano con su empuje, sino también cualquier objeto. Si se utilizan una serie de emisores ultrasonoros cuidadosamente sincronizados, es posible enfocar las ondas sonoras hacia un punto preciso. Y, si ese punto es tocado por la mano, ésta podrá sentirlo aunque no lo veamos.
Y es que, con la expansión multimedia, nuestros ojos y oídos están siendo inundados con todo tipo de información sensorial. Pero el tacto sigue abandonado, dada la dificultad tecnológica que entraña lograr sensaciones a este nivel. Sin embargo, es evidente que el público demanda cada vez más interacción y realismo en sus experiencias virtuales.
Hasta ahora, asir un objeto inexistente con nuestras manos y sentirlo, aunque en realidad sólo exista en una pantalla de ordenador, ha sido posible únicamente si nos enfundamos un guante equipado con sensores capaces de decodificar los movimientos de la mano, e imprimirle calculadas sensaciones, a tiempo real.
Sin embargo, la ilusión sensorial se ve minada en estos casos por el peso de esta especie de exoesqueleto que es el guante (que puede pesar alrededor de un kilo), por lo que dista mucho de ser “perfecta”.
Solución ultrasónica
Ahora, un equipo de investigadores de la Universidad de Tokio, en Japón, ha conseguido desarrollar una alternativa, que fue presentada en la conferencia sobre infografía o computación gráfica Siggraph 2008, celebrada el pasado agosto en Los Ángeles.
Se trata de un dispositivo bautizado como Airborne Ultrasound Tactile Display - 5k-, que irradia ondas de ultrasonido por el aire, producidas por múltiples transductores de ultrasonido basados en técnicas de síntesis de ondas. Con dichas ondas, se forman campos de presión de alta-fidelidad que pueden “enfocarse” directamente sobre la piel sin riesgo de atravesarla.
El efecto: con este sistema es posible experimentar sensaciones táctiles de un espacio virtual, sin necesidad de usar guantes u otros anexos mecánicos, señala Siggraph 2008 en un comunicado. La finalidad de este invento es aumentar el efecto táctil de los gráficos en tres dimensiones en el espacio, para lograr una sensación más creíble de estar tocando las figuras tridimensionales que aparecen en el ordenador.
Es dispositivo táctil utiliza uno de los fenómenos no lineales del ultrasonido: la presión de la radiación acústica. Diversos patrones espaciales de la presión de esta radiación pueden ser sintetizados usando la interferencia del ultrasonido.
Y es que el sonido es, en efecto, una onda de presión capaz de mover no sólo nuestro tímpano con su empuje, sino también cualquier objeto. Si se utilizan una serie de emisores ultrasonoros cuidadosamente sincronizados, es posible enfocar las ondas sonoras hacia un punto preciso. Y, si ese punto es tocado por la mano, ésta podrá sentirlo aunque no lo veamos.

Primer prototipo
El primer prototipo creado por el profesor Takayuki Iwamoto y sus colaboradores de la Universidad de Tokio cuenta con 85 emisores de ultrasonido, y actualmente sólo funciona en un plano vertical.
El punto de convergencia puede ser enfocado con una precisión de un centímetro, movido a voluntad o dividido en muchas partes que pueden ser experimentadas por varias personas simultáneamente.
En la demostración llevada a cabo en Siggraph 2008, el aparato emisor estaba acoplado a una cámara que descifraba la posición de la mano y dirigía el desplazamiento de dicho punto, provocando la sensación a los usuarios de estar tocando una superficie plana o el borde de un cubo. En la pantalla, también aparecía la imagen virtual correspondiente, que completaba la ilusión.
Técnicamente, el campo de fuerza creado por una onda ultrasónica de 1 kHz de ancho de banda, ocupa una región espacial de 30 cm³, con una resolución de un centímetro. En volumen, estas ondas producirían sobre la mano una fuerza equivalente a una masa de 10 gramos.
En la actualidad, los investigadores quieren afinar la resolución espacial del objeto virtual, con el fin de dotarlo de una forma y una textura precisas. El detalle técnico del dispositivo está recogido en un libro.
Posibles aplicaciones
Las aplicaciones de este dispositivo, en el futuro, serían numerosas. Desde presentaciones táctiles interactivas o la posibilidad de que los usuarios manipulen directamente los elementos de un gráfico en tres dimensiones, hasta el desarrollo de representaciones perfeccionadas de objetos tridimensionales que podremos sentir con nuestras propias manos.
Por otro lado, podría llegar a desarrollarse una nueva forma de telemanipulación a distancia. Por ejemplo, un neurocirujano podría efectuar una intervención quirúrgica manipulando la imagen de un segmento de nervio representado por un holograma flotante, mientras que la operación real se efectúa en un paciente situado, tal vez, en un hospital de otro país.
El profesor Iwamoto planea asimismo unir el dispositivo con video juegos, dado el interés mostrado en el proyecto por la industria especializada. De hecho, los creadores del sistema recibieron propuestas de diversas empresas a raíz de la presentación en Los Ángeles del Airborne Ultrasound Tactile Display.
Finalmente, en usos industriales, resultaría útil para la manipulación de pequeñas partículas o para probar la superficie de objetos para calibrar sus propiedades viscoelásticas a distancia.
El primer prototipo creado por el profesor Takayuki Iwamoto y sus colaboradores de la Universidad de Tokio cuenta con 85 emisores de ultrasonido, y actualmente sólo funciona en un plano vertical.
El punto de convergencia puede ser enfocado con una precisión de un centímetro, movido a voluntad o dividido en muchas partes que pueden ser experimentadas por varias personas simultáneamente.
En la demostración llevada a cabo en Siggraph 2008, el aparato emisor estaba acoplado a una cámara que descifraba la posición de la mano y dirigía el desplazamiento de dicho punto, provocando la sensación a los usuarios de estar tocando una superficie plana o el borde de un cubo. En la pantalla, también aparecía la imagen virtual correspondiente, que completaba la ilusión.
Técnicamente, el campo de fuerza creado por una onda ultrasónica de 1 kHz de ancho de banda, ocupa una región espacial de 30 cm³, con una resolución de un centímetro. En volumen, estas ondas producirían sobre la mano una fuerza equivalente a una masa de 10 gramos.
En la actualidad, los investigadores quieren afinar la resolución espacial del objeto virtual, con el fin de dotarlo de una forma y una textura precisas. El detalle técnico del dispositivo está recogido en un libro.
Posibles aplicaciones
Las aplicaciones de este dispositivo, en el futuro, serían numerosas. Desde presentaciones táctiles interactivas o la posibilidad de que los usuarios manipulen directamente los elementos de un gráfico en tres dimensiones, hasta el desarrollo de representaciones perfeccionadas de objetos tridimensionales que podremos sentir con nuestras propias manos.
Por otro lado, podría llegar a desarrollarse una nueva forma de telemanipulación a distancia. Por ejemplo, un neurocirujano podría efectuar una intervención quirúrgica manipulando la imagen de un segmento de nervio representado por un holograma flotante, mientras que la operación real se efectúa en un paciente situado, tal vez, en un hospital de otro país.
El profesor Iwamoto planea asimismo unir el dispositivo con video juegos, dado el interés mostrado en el proyecto por la industria especializada. De hecho, los creadores del sistema recibieron propuestas de diversas empresas a raíz de la presentación en Los Ángeles del Airborne Ultrasound Tactile Display.
Finalmente, en usos industriales, resultaría útil para la manipulación de pequeñas partículas o para probar la superficie de objetos para calibrar sus propiedades viscoelásticas a distancia.