La cápsula (a la izquierda) y el robot de origami. Imagen: Melanie Gonick. Fuente: MIT.
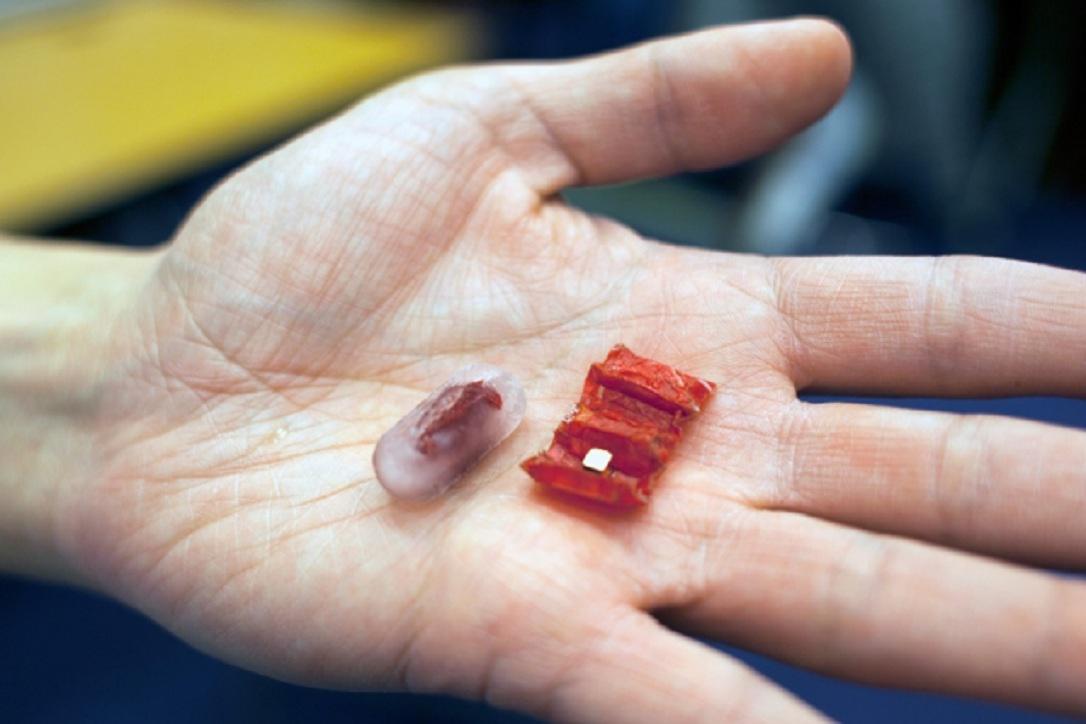
En experimentos de simulación del esófago y el estómago humanos, investigadores del MIT (Massachusetts Institute of Technology, Boston, EE.UU.), la Universidad de Sheffield (Reino Unido) y el Instituto de Tecnología de Tokio (Japón) han demostrado que un pequeño robot de origami (papiroflexia) puede desplegarse a partir de una cápsula ingerible y, dirigido por campos magnéticos externos, arrastrarse a través de la pared del estómago para extraer una pila de botón ingerida o parchear una herida.
El nuevo trabajo, que los investigadores están presentando esta semana en la Conferencia Internacional de Robótica y Automatización, se basa en una larga serie de artículos sobre robots de origami del grupo de investigación de Daniela Rus, profesora del Departamento de Ingeniería Eléctrica y Ciencias de la Computación de MIT.
"Para aplicaciones en el interior del cuerpo", explica Rus en MIT News, "necesitamos un sistema de robot pequeño y controlable, sin ataduras. Es realmente difícil controlar y colocar un robot en el interior del cuerpo si está unido a una correa de sujeción".
A pesar de que el nuevo robot sucede a uno presentado en la misma conferencia el año pasado, el diseño de su cuerpo es significativamente diferente. Al igual que su predecesor, puede impulsarse mediante lo que se llama un movimiento de "stick-slip": sus apéndices se adhieren a una superficie a través de la fricción cuando se ejecuta un movimiento, pero se deslizan libres de nuevo cuando su cuerpo se flexiona para cambiar la distribución de peso.
También como su predecesor -y al igual que varios otros robots origami del grupo de Rus- el nuevo robot se compone de dos capas de material estructural entre los cuales está intercalado un material que se contrae cuando se calienta. Un patrón de hendiduras en las capas exteriores determina cómo se plega el robot cuando la capa media se contrae.
Material
El uso previsto del robot también dictó una serie de modificaciones estructurales. "El stick-slip sólo funciona cuando 1) el robot es lo suficientemente pequeño y 2) es lo suficientemente rígido", dice Steven Guitron, estudiante de posgrado en ingeniería mecánica. "Con el diseño original de Mylar (tereftalato de polietileno), era mucho más rígido que el nuevo diseño, que se basa en un material biocompatible."
Para compensar la maleabilidad relativa del material biocompatible, los investigadores tuvieron que llegar a un diseño que requiriera un menor número de ranuras. Al mismo tiempo, los pliegues del robot aumentan de rigidez a lo largo de ciertos ejes.
Pero debido a que el estómago está lleno de fluidos, el robot no se basa totalmente en el movimiento stick-slip. "En nuestros cálculos, el 20 por ciento del movimiento hacia adelante es mediante propulsión de agua -empuje- y el 80 por ciento es por el movimiento stick-slip ", dice Shuhei Miyashita, ahora en la Universidad de York (Inglaterra). "En este sentido, hemos aplicado el concepto y características de una aleta, como se puede observar en el diseño relativamente plano".
También tenía que ser posible comprimir el robot lo suficiente para que cupiera en una cápsula tragable; del mismo modo, cuando la cápsula se disolviera, las fuerzas que actuaran sobre el robot tenían que ser lo suficientemente fuertes para hacer que se desplegara completamente.
A través de un proceso de diseño que Guitron describe como "mayormente ensayo y error", los investigadores llegaron a un robot rectangular con pliegues de acordeón perpendiculares a su eje longitudinal y esquinas pinzadas que actúan como puntos de tracción.
En el centro de uno de los pliegues de acordeón de delante hay un imán permanente que responde a los cambios en los campos magnéticos externos al organismo, que controlan el movimiento del robot. Las fuerzas aplicadas al robot son principalmente de rotación. En los experimentos de los investigadores, el robot utiliza el mismo imán para recoger la pila de botón.
El nuevo trabajo, que los investigadores están presentando esta semana en la Conferencia Internacional de Robótica y Automatización, se basa en una larga serie de artículos sobre robots de origami del grupo de investigación de Daniela Rus, profesora del Departamento de Ingeniería Eléctrica y Ciencias de la Computación de MIT.
"Para aplicaciones en el interior del cuerpo", explica Rus en MIT News, "necesitamos un sistema de robot pequeño y controlable, sin ataduras. Es realmente difícil controlar y colocar un robot en el interior del cuerpo si está unido a una correa de sujeción".
A pesar de que el nuevo robot sucede a uno presentado en la misma conferencia el año pasado, el diseño de su cuerpo es significativamente diferente. Al igual que su predecesor, puede impulsarse mediante lo que se llama un movimiento de "stick-slip": sus apéndices se adhieren a una superficie a través de la fricción cuando se ejecuta un movimiento, pero se deslizan libres de nuevo cuando su cuerpo se flexiona para cambiar la distribución de peso.
También como su predecesor -y al igual que varios otros robots origami del grupo de Rus- el nuevo robot se compone de dos capas de material estructural entre los cuales está intercalado un material que se contrae cuando se calienta. Un patrón de hendiduras en las capas exteriores determina cómo se plega el robot cuando la capa media se contrae.
Material
El uso previsto del robot también dictó una serie de modificaciones estructurales. "El stick-slip sólo funciona cuando 1) el robot es lo suficientemente pequeño y 2) es lo suficientemente rígido", dice Steven Guitron, estudiante de posgrado en ingeniería mecánica. "Con el diseño original de Mylar (tereftalato de polietileno), era mucho más rígido que el nuevo diseño, que se basa en un material biocompatible."
Para compensar la maleabilidad relativa del material biocompatible, los investigadores tuvieron que llegar a un diseño que requiriera un menor número de ranuras. Al mismo tiempo, los pliegues del robot aumentan de rigidez a lo largo de ciertos ejes.
Pero debido a que el estómago está lleno de fluidos, el robot no se basa totalmente en el movimiento stick-slip. "En nuestros cálculos, el 20 por ciento del movimiento hacia adelante es mediante propulsión de agua -empuje- y el 80 por ciento es por el movimiento stick-slip ", dice Shuhei Miyashita, ahora en la Universidad de York (Inglaterra). "En este sentido, hemos aplicado el concepto y características de una aleta, como se puede observar en el diseño relativamente plano".
También tenía que ser posible comprimir el robot lo suficiente para que cupiera en una cápsula tragable; del mismo modo, cuando la cápsula se disolviera, las fuerzas que actuaran sobre el robot tenían que ser lo suficientemente fuertes para hacer que se desplegara completamente.
A través de un proceso de diseño que Guitron describe como "mayormente ensayo y error", los investigadores llegaron a un robot rectangular con pliegues de acordeón perpendiculares a su eje longitudinal y esquinas pinzadas que actúan como puntos de tracción.
En el centro de uno de los pliegues de acordeón de delante hay un imán permanente que responde a los cambios en los campos magnéticos externos al organismo, que controlan el movimiento del robot. Las fuerzas aplicadas al robot son principalmente de rotación. En los experimentos de los investigadores, el robot utiliza el mismo imán para recoger la pila de botón.
Precedentes
Los investigadores probaron una docena de posibilidades diferentes para el material estructural antes de decidirse por el tipo de intestino de cerdo seco usado en las envolturas de embutidos. La capa de contracción es un plástico de embalar biodegradable llamado Biolefin.
Para diseñar su estómago sintético, los investigadores compraron un estómago de cerdo y ensayaron sus propiedades mecánicas. Su modelo es una sección transversal abierta del estómago y el esófago, moldeado a partir de un caucho de silicona con el mismo perfil mecánico. Una mezcla de agua y zumo de limón simula los fluidos ácidos del estómago.
Cada año la gente se traga 3.500 pilas de botón, sólo en EE.UU. Con frecuencia, las baterías son digeridos con normalidad, pero si entran en contacto prolongado con el tejido del esófago o estómago, pueden causar una corriente eléctrica que produce hidróxido, que quema el tejido.
Miyashita empleó una estrategia inteligente para convencer a Rus de que la eliminación de las pilas de botón ingeridas y el tratamiento de las heridas consiguientes era una aplicación convincente de su robot de origami.
"Shuhei compró un trozo de jamón, y puso la batería en el jamón", dice Rus. "Al cabo de media hora, la batería se sumergió totalmente en el jamón. Así que me hizo darme cuenta de que, sí, esto es importante. Si usted tiene una batería en su cuerpo, debe sacarla tan pronto como sea posible".
Los investigadores probaron una docena de posibilidades diferentes para el material estructural antes de decidirse por el tipo de intestino de cerdo seco usado en las envolturas de embutidos. La capa de contracción es un plástico de embalar biodegradable llamado Biolefin.
Para diseñar su estómago sintético, los investigadores compraron un estómago de cerdo y ensayaron sus propiedades mecánicas. Su modelo es una sección transversal abierta del estómago y el esófago, moldeado a partir de un caucho de silicona con el mismo perfil mecánico. Una mezcla de agua y zumo de limón simula los fluidos ácidos del estómago.
Cada año la gente se traga 3.500 pilas de botón, sólo en EE.UU. Con frecuencia, las baterías son digeridos con normalidad, pero si entran en contacto prolongado con el tejido del esófago o estómago, pueden causar una corriente eléctrica que produce hidróxido, que quema el tejido.
Miyashita empleó una estrategia inteligente para convencer a Rus de que la eliminación de las pilas de botón ingeridas y el tratamiento de las heridas consiguientes era una aplicación convincente de su robot de origami.
"Shuhei compró un trozo de jamón, y puso la batería en el jamón", dice Rus. "Al cabo de media hora, la batería se sumergió totalmente en el jamón. Así que me hizo darme cuenta de que, sí, esto es importante. Si usted tiene una batería en su cuerpo, debe sacarla tan pronto como sea posible".