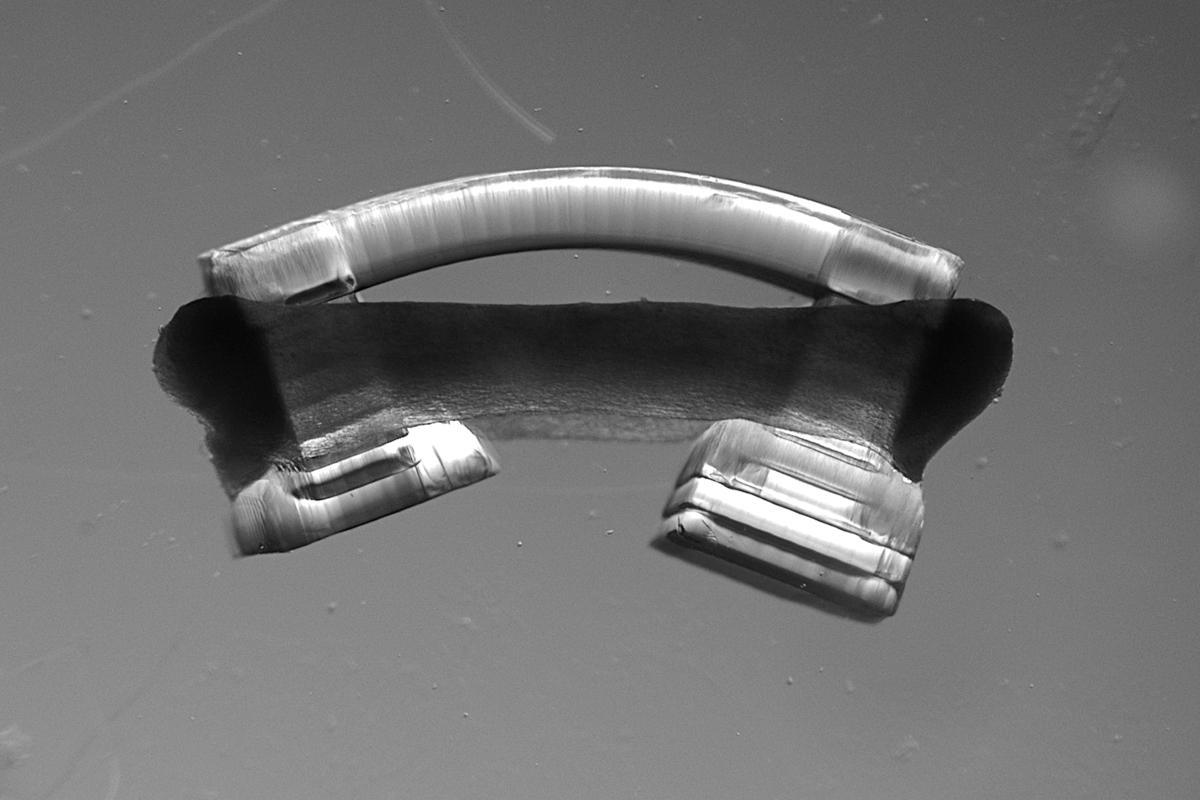
Un bio-robot: anillo de músculo alrededor de un esqueleto flexible impreso en 3D. Imagen: R. Raman. Fuente: Universidad de Illinois.
Una nueva clase de robots biológicos en miniatura, o bio-robots, ha visto la luz. Están hechos de células musculares que han sido manipuladas genéticamente para responder a la luz, dando a los investigadores control sobre el movimiento de los robots, un paso clave para su uso en aplicaciones de salud, detección y medio ambiente.
Dirigidos por Rashid Bashir, jefe de bioingeniería de la Universidad de Illinois (EE.UU.), los investigadores han publicado sus resultados en Proceedings of the National Academy of Sciences.
"La luz es una forma no invasiva de controlar estas máquinas", dice Bashir en la información de la universidad. "Nos da flexibilidad en el diseño y el movimiento. La idea principal que estamos tratando de lograr es el diseño avanzado de sistemas biológicos, y creemos que el control de la luz es un paso importante hacia ello".
El grupo había probado previamente bio-robots que se activan con un campo eléctrico, pero la electricidad puede causar efectos secundarios adversos a un entorno biológico y no permite la estimulación selectiva de regiones distintas del músculo para dirigir el bio-bot, dice Bashir. La nueva técnica de estimulación con luz es menos invasiva y permite a los investigadores dirigir los bio-robots en diferentes direcciones. Los bio-robots giran y caminan hacia el estímulo de luz, explican.
Dirigidos por Rashid Bashir, jefe de bioingeniería de la Universidad de Illinois (EE.UU.), los investigadores han publicado sus resultados en Proceedings of the National Academy of Sciences.
"La luz es una forma no invasiva de controlar estas máquinas", dice Bashir en la información de la universidad. "Nos da flexibilidad en el diseño y el movimiento. La idea principal que estamos tratando de lograr es el diseño avanzado de sistemas biológicos, y creemos que el control de la luz es un paso importante hacia ello".
El grupo había probado previamente bio-robots que se activan con un campo eléctrico, pero la electricidad puede causar efectos secundarios adversos a un entorno biológico y no permite la estimulación selectiva de regiones distintas del músculo para dirigir el bio-bot, dice Bashir. La nueva técnica de estimulación con luz es menos invasiva y permite a los investigadores dirigir los bio-robots en diferentes direcciones. Los bio-robots giran y caminan hacia el estímulo de luz, explican.
Anillos de músculo
Los investigadores comienzan haciendo crecer anillos de tejido muscular a partir de una línea celular de ratón. Las células musculares tienen un gen adicional para permitir que una cierta longitud de onda de luz azul estimule el músculo para que se contraiga, una técnica llamada optogenética. Los anillos rodean huesos flexibles impresos en 3D y tienen entre 7 milímetros y 2 centímetros de longitud.
"Los anillos de músculo esquelético que diseñamos tienen la forma de anillos o bandas de goma, ya que queremos que sean modulares", dice la estudiante de posgrado Ritu Raman, primera autora del artículo. "Esto significa que podemos tratarlos como bloques de construcción que se pueden combinar con cualquier esqueleto impreso en 3D para hacer bio-robots para varias aplicaciones diferentes."
Además del diseño modular, los anillos musculares delgados tienen la ventaja de permitir que la luz y los nutrientes se difundan en el tejido desde todos los lados. Esto contrasta con los diseños de bio-bots anteriores, que utilizaban una banda gruesa de tejido muscular alrededor del esqueleto.
Configuraciones
Los investigadores probaron esqueletos de una variedad de tamaños y formas para encontrar configuraciones que generan el movimiento óptimo. También ejercitaban los anillos musculares diariamente, activando el músculo con una luz intermitente, para hacerlos más fuertes y que los robots se movieran más lejos con cada contracción.
"Se trata de un diseño mucho más flexible", dice Bashir. "Con los anillos, podemos conectar dos articulaciones o bisagras en el esqueleto impreso en 3-D. Podemos tener múltiples patas y múltiples anillos. Con la luz, podemos controlar en qué dirección se mueven las cosas. La gente puede usarlo para construir sistemas más complejos".
Los investigadores comienzan haciendo crecer anillos de tejido muscular a partir de una línea celular de ratón. Las células musculares tienen un gen adicional para permitir que una cierta longitud de onda de luz azul estimule el músculo para que se contraiga, una técnica llamada optogenética. Los anillos rodean huesos flexibles impresos en 3D y tienen entre 7 milímetros y 2 centímetros de longitud.
"Los anillos de músculo esquelético que diseñamos tienen la forma de anillos o bandas de goma, ya que queremos que sean modulares", dice la estudiante de posgrado Ritu Raman, primera autora del artículo. "Esto significa que podemos tratarlos como bloques de construcción que se pueden combinar con cualquier esqueleto impreso en 3D para hacer bio-robots para varias aplicaciones diferentes."
Además del diseño modular, los anillos musculares delgados tienen la ventaja de permitir que la luz y los nutrientes se difundan en el tejido desde todos los lados. Esto contrasta con los diseños de bio-bots anteriores, que utilizaban una banda gruesa de tejido muscular alrededor del esqueleto.
Configuraciones
Los investigadores probaron esqueletos de una variedad de tamaños y formas para encontrar configuraciones que generan el movimiento óptimo. También ejercitaban los anillos musculares diariamente, activando el músculo con una luz intermitente, para hacerlos más fuertes y que los robots se movieran más lejos con cada contracción.
"Se trata de un diseño mucho más flexible", dice Bashir. "Con los anillos, podemos conectar dos articulaciones o bisagras en el esqueleto impreso en 3-D. Podemos tener múltiples patas y múltiples anillos. Con la luz, podemos controlar en qué dirección se mueven las cosas. La gente puede usarlo para construir sistemas más complejos".
Referencia bibliográfica:
Ritu Raman, Caroline Cvetkovic, Sebastien G. M. Uzel, Randall J. Platt, Parijat Sengupta, Roger D. Kamm, y Rashid Bashir: Optogenetic skeletal muscle-powered adaptive biological machines. PNAS (2016). DOI: 10.1073/pnas.1516139113.
Ritu Raman, Caroline Cvetkovic, Sebastien G. M. Uzel, Randall J. Platt, Parijat Sengupta, Roger D. Kamm, y Rashid Bashir: Optogenetic skeletal muscle-powered adaptive biological machines. PNAS (2016). DOI: 10.1073/pnas.1516139113.